

沈阳专业.推荐汽车前后桥分装线厂家

下面我们从应用规划,人机管理,效率,本钱四个大的方面给大家做一个简单地比拟剖析。规划方面:桁架机械手普遍架设在机床的上方,轨迹单一,占空中积小。 关节机器人普通是采取一对2或1对3(品字形规划),为保证平安需对整个加工单元停止一个全面的防护,而倒挂行走机器人由于本钱太高,系统复杂稳定性低,很少投入实践应用。人机协作方面:桁架机器人消费线工人能够时时监测加工过程,问题扫除疾速,抽检便当,人机协作较好。由于关节机器人的运动轨迹不可预见性,消费单元全部封锁在实践消费过程中工人没法参与,消费过程中对单元中的料仓,消费设备,机器人停止一系列的监控管理,系统庞大复杂本钱高。效率(开机率):“开机率”业内权衡设备稳定消费的规范。引入机器人自动上下料料,在实践消费过程中这对毛坯质量的稳定性,刀具质量及寿命管理需有着更高的请求。关节机器人上下料。整个消费过程无人化,对刀具的管理包括详细到哪一把刀做的那一个尺寸,能否需求刀补,补刀的尺寸,只能经过丈量输出端的产品尺寸来肯定揣测,若这一尺寸有几把刀参与,对消费管理应战较大,系统集成请求较高。桁架机械手由于人机协作性较好,抽检,补刀都能够低门槛完成。本钱方面:单价,管理维护本钱桁架机械手普遍低于关节机器人。
运用桁架机器人的过程中,会遇到一些问题,那么今天工控资料窝小编就带大家来看下桁架机器人常见问题的处置方法有哪些,下面就细致说说。关于调试和缺点并存的电气设备,应先扫除缺点,再中止调试,调试必需在电气线路正常的前提下中止。应先检查设备有无明显裂痕、缺损,了解其维修史、运用年限等,然后再对机内中止检查。拆前应扫除周边的缺点要素,肯定为机内缺点后才干拆卸,否则,盲目拆卸,可能将设备越修越坏。只需在肯定机械零件无缺点后,再中止电气方面的检查。检查电路缺点时,应应用检测仪器寻觅缺点部位,确认无接触不良缺点后,再有针对性地查看线路与机械的运作关系,以免误判。先不要急于改换损坏的桁架机器人电气部件,在确认外围设备电路正常时,再思索改换损坏的电气部件。检修时,必需先检查直流回路静态工作点,再检查交流回路动态工作点。

众多桁架机械手的案例理论中,证明自动上下料桁架机器人几乎可以在工业消费中的各行各业被大量普遍应用,数控机床加工消费线和自动化程度高的加工设备曾经成为今后制造工厂的一个必然趋向。当今世界移动互联网、物联网、大数据等重生代技术交流碰撞日益频繁,中国制造企业在面对国内外经济压力下选择展开智能自动化制造这一新兴产业,是完成工业转型升级,全面推进制造业“机器换人”,助推工业化和信息化在高层次上深度融合的一条较为理性展开道路。在现代化消费线中,越来越讲究的是柔性化、自动化、智能化消费。工业机器人大范围替代传统人力中止消费活动是大势所趋。在数控机床加工消费中,桁架机器人将人类将从单调繁杂的膂力劳动中解放出来,从事愈加富有创造性的工作。桁架机械手由多维直线导轨搭建而成。直线导轨由精制铝型材、齿型带、直线滑动导轨和伺服电机等组成。作为运动框架和载体的精制铝型材其截面外形经过有限元分析法来优化设计,消费中的如虎添翼地确保其强度和直线度。采用轴承光杠和直线滑动导轨作为运动导轨。运动传动机构 采用齿型带,齿条或滚珠丝杠。
桁架机械手自投入消费运用,对比工业机器人,投资本钱低,性能也稳定,可完成高精度,应用范畴宽广,深受宽广中小加工企业的喜欢! 我们不断秉持:客户需求至上、产质量量至上、效劳至上的运营理念,深深根植于每位利华美人所从事的一切工作中,我们获得竞争优势,让客户安心、满意。桁架机械手作为一种直角坐标机器人,因其机构相对简单,性价比高,近年来得到许多机床加工企业的喜欢。目前,国内已有的关节式机器人结构复杂,本钱较高。由于部门机床上下料加工消费线用上下料加工过程相对简单,于是开发适宜机床自动化桁架式机械手响应了市场恳求,特别是展开以大批量消费为主的机床上下料加工的必然趋向,同时对机床的智能化展开也有重要的意义。针对数控车床,设计了与其配套的上下料桁架机械手,不光动作 可靠平稳,而且结构简单、工艺性好,使其既能满足功用恳求又具有良好的经济性。

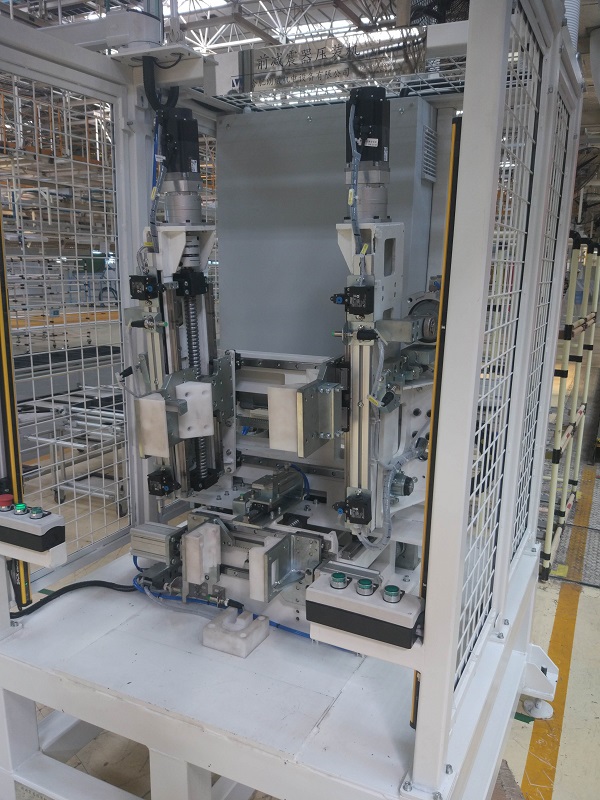
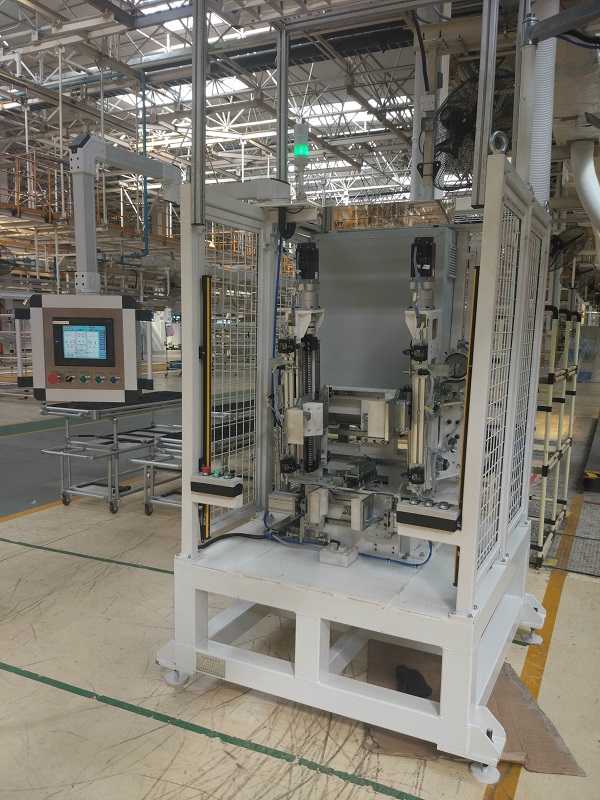
双联机桁架机械手的特性:1、针对法兰盘、齿轮、轴承内外圈、电机零部件、汽车轮毂灯盘类零件和轴类、销子、阀芯灯轴类零件的五人加工系统。2、料仓依据理论产品配置,选配翻转台是,能够完成零件的正反两个工序3、采用一拖二的方式(一台机械手带两台机床)或二拖二,分摊到单台机床的本钱低,沈阳专业.推荐汽车前后桥分装线适合大多数有两个工序的零件。4、采用封装技术,整体消费、运输、装置和调试,料仓和机器人一体化,在顾客现场调试时间短5、特别适合用户现场机床的改造。双联机数控机床机械手应用范畴:普遍应用于汽车、摩托车、电动车、LED、电子电器、通讯设备、齿类、轴承、安防、工程器械卫浴、厨具、生活用品等行业的零配件加工范畴。汽车前后桥分装线厂家双联机桁架机械手末端安装包括启动旋转缸、气入手指、夹具,研发团队依据数控车床加工工件的装夹工艺央求配置合适的末端安装,满足各种轴类、圆形工件、环形工件、方形工件、异性工件等其他奇特工件,以内撑或外爪等方式施行快速、精确装夹央求。

在现代工业中,消费过程中的自动化已成为突出的主题,各行各业的自动化水平越来越高,运用数控加工中心加工工件时,恳求工件在工作台上具有非常高的定位精度,且需求保证每次上料的分歧性。经过完善的运营管理制度,鼓舞创新机制,在确保机床质量前端的同时,努力于对工作质量的日益改进和完善。桁架式机器人机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。1.结构框架,主要由立柱等结构件组成,其作用是将各轴架空至相应高度,多由铝型材或方管,矩形管,圆管等焊接件构成;2.X轴组件、Y轴组件、Z轴组件,三个运动组件为桁架机械手的中心组件,其定义规则遵照笛卡尔坐标系。3. 桁架机械手各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。

