

湖北优质非标设备厂

桁架机械手是组成现阶段自动化工厂的重要工具,上面的机械手案例其主要作用为搬运移载物体。简单引见:● 两轴桁架机械手,完成板材的搬运● 抓手采用吸盘● 速度快,精准定位,大大进步效率 特性为:1. 多自由度运动,每个运动自由度之间的空间夹角为直角。2. 自动控制的,可重复编程,一切的运动均按程序运转。3. 普通由控制系统、驱动系统、机械系统、操作工具等组成。4. 灵活,多功用,因操作工具的不同功用也不同。5. 高可靠性、高速度、高精度。6. 可用于恶劣的环境,可长期工作,便于操作维修。根据末端操作工具的不同,直角坐标机器人可以非常便当的用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂等一系列工作。特别适用于多品种,便批量的柔性化作业,关于稳定,进步产质量量,进步劳动消费率,改善劳动条件和产品的快速更新换代起着十分重要的作用。

在现代工业中,消费过程中的自动化已成为突出的主题,各行各业的自动化水平越来越高,运用数控加工中心加工工件时,恳求工件在工作台上具有非常高的定位精度,且需求保证每次上料的分歧性。经过完善的运营管理制度,鼓舞创新机制,在确保机床质量前端的同时,努力于对工作质量的日益改进和完善。桁架式机器人机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。1.结构框架,主要由立柱等结构件组成,其作用是将各轴架空至相应高度,多由铝型材或方管,矩形管,圆管等焊接件构成;2.X轴组件、Y轴组件、Z轴组件,三个运动组件为桁架机械手的中心组件,其定义规则遵照笛卡尔坐标系。3. 桁架机械手各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。
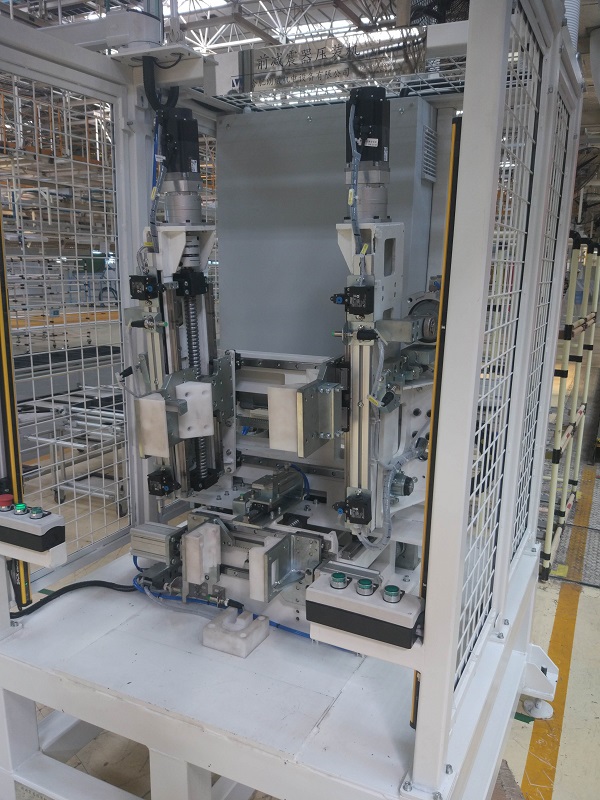
机械手主要由执行机构、驱动机构和控制系统三大局部组成。手部是用来抓持工件(或工具)的部件,依据被抓持物件的外形、尺寸、重量、资料和作业请求而有多种构造方式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、挪动或复合运动来完成规则的动作,改动被抓持物件的位置和姿态。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自在度 。为了抓取空间中恣意位置和方位的物体,需有6个自在度。自在度是机 械手设计的关 键参数。自在 度越多,机械手的灵敏性越大,通用性越广,其构造也越复杂。普通专用机械手有2~3个自在度。控制系统是经过对机械手每个自在度的电机的控制,来完成特定动作。同时接纳传感器反应的信息,构成稳定的闭环控制。控制系统的中心通常是由单片机或dsp等微控制芯片构成,经过对其编程完成所要功用。

经过四十多年的展开,工业机器人已在越来越多的范畴得到了应用。近年来,各地域制造企业实施“机器换人”步伐加速,愈加突显传统技工被“交流”危机感。企业尽可能的采用高新技术来进步效率的消费,以高竞争力取胜,湖北非标设备厂这就需求应用工业机器人机械手,毕竟人是没有机器人那样的精确率,准确率,并且作为长期的利益展开,选择工业机器人桁架机械手远比人工线愈加划算。随着工业机器人向更深更广方向的展开以及机器人智能化水平的进步,工业机器人机械手的应用范周还在不时地扩展,展开至今,工业机器人机械手已从汽车制造业推行到其他制造业,进而推行到诸如采矿 机器人、建筑业机器人以及水电系统维护维修机器人等各种非制造行业。工业机器人都替代人工中止许多环节的工作。优质非标设备桁架机械手机器人在国内的展开时间也不短了,已有十多年历史,无论什么行业,都有展开期,特别是桁架机器人这种高技术含量的产品,有些企业是一朝被蛇咬,十年怕井绳,这些企业家在n年前就曾经运用了数控车床机器人,但是由于那时的数控车床机器人的技术还不算成熟。于是在企业家的脑海里留下的印象是:桁架机械手机器人的速度还不如人手快。

