

合肥优质升降机厂家

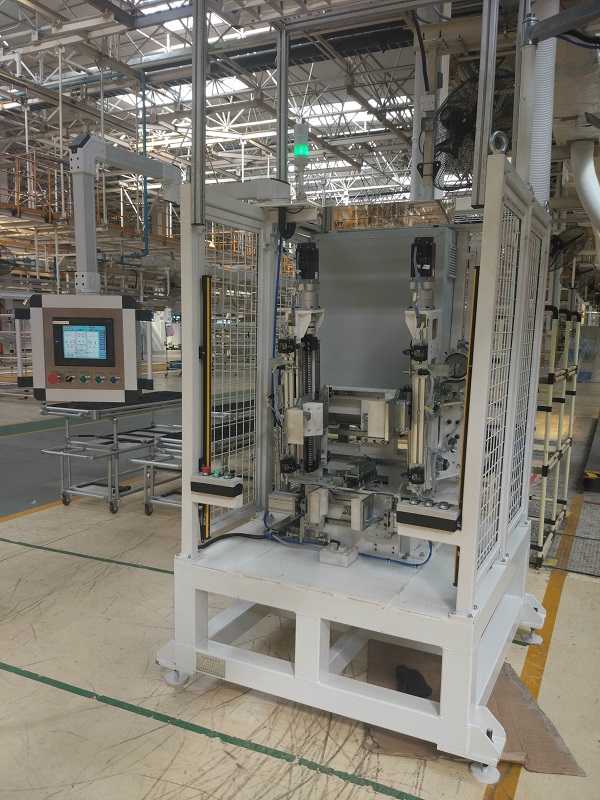
桁架式机械手是替代人工上下料的一种智能配备,能够完成加工过程自动化,应用桁架式机器人机械手能够大大地进步工作效率。桁架式上下料机械手又叫做上下料机械手柔性系统,适用于各种机床的上料和下料,具有这样的机械手消费线能彰显企业的消费实力,进步市场的竞争力,是工业消费加工的必然趋向。一、实例产品工艺解析整体的工艺流程1、设备启动;2、Z轴机械手回参考点,开端执行动作;3、需求上下料时,Z轴移动到托盘上方夹取工件;4、Z轴上升,水平移动到机床工作台上方,降落至工作台上夹具处,夹取已加工工件,然后旋转Z轴端部夹具,将待加工件装夹到工作台夹具上,完成先下料后上料过程。5、Z轴移动至托盘上方,将已加工工件放入托盘对应位置。

近几年来工业机器人与数控机床集成应用展开很快,应用的方式不时扩展,对当前机床智能化潮流带来新的促动,对我国机床制造行业的转型升级也必将起到有益的推进作用。因此在现代化数控加工车间,常配有桁架机械手和关节机器人,以进步消费效率,完成工人难以完成的或者风险的工作。有的关节型机器人可以内置视觉系统,关于一些特别的产品还可以经过增加视觉识别装置对工件的放置位置、相位、正反面等中止自动识别和判别,并根据结果中止相应的动作,完成智能化的自动化消费,还可以让机器人在装卡工件之余,中止工件的清洗、吹干、检验和去毛刺等作业,大大进步了关节式机器人的应用率。关节机器人可以正面安装、倒立安装、或者安装在轨道上效劳更多的加工设备。

桁架机器人进步了工厂消费效率,降低本钱,进步产品的质量和产量。并且用来处置一些手工消费很难完成的一些工位及动作。有很多客户在置办中会咨询桁架机器人耗电情况,需求怎样的供电系统,那么,小编就细致分析一下机床机器人对电源电压有什么恳求呢?1.桁架机器人设备关于工作环境的恳求精密桁架机器人设备普通有恒温环境的恳求,只需在恒温条件下,才干确保机械手精度和工作位置精度。普通普通型机械手对室温没有细致恳求,但大量理论标明,当室温过高时数控系统的缺点率大大增加。2..电压不稳定的,这种现象,在CNC加工中心或车削中心等机床设备上都曾发作过,而且呈现频率较高,应惹起注重。建议在CNC机械手较集中的车间配置具有自动补偿调理功用的交流稳压供电系统;单台CNC机械手可单独配置交流稳压器来处置。3.除非机械电气设备采用插头/插座直接衔接电源处,否则建议电源线直接连到电源切断开关的电源端子上。假设这样做不到,则应为电源线设置独立的接线座。电源切断开关的手柄应容易接近,应安装在易于操作位置以上0.6m~1.9m间。上限值建议为1.7m。这样可以在发作紧急情况下疾速断电,减少损失和人员伤亡。
其中,桁架机器人机械手的重要部位——手臂,在相应的载荷和相应的速度下,完成在机械手所央求的工作空间内的运动。在中止桁架式机械手手臂设计时,要遵照下述准绳:1.应尽可能使全自动桁架机械手手臂各关节轴互相平行;互相垂直的轴应尽可能相交于一点,这样能够使机械手运动学正逆运算简化,有利于机械手的控制。2.减少摩擦作为机器人机械手工作的条件之一,桁架式机械手也要尽可能地减少机械间隙所构成的运动误差,因而在设计桁架式机械手的时分,机械手各关节的轴承间隙要尽可能小,优质升降机各关节都应有工作牢靠、便于调整的轴承间隙调整机构。3.应在保证机械手手臂有足够强度和刚度的条件下,尽可能在构造上、资料上设法减轻手臂的重量。力图选用高强度的轻质资料,通常选用高强度铝合金制造机械手的手臂。升降机厂家以此来进步桁架式机械手的运动速度与控制精度。4.桁架式机械手手臂在构造上要思索各关节的限位开关和具有相应缓冲才干的机限位块,以及驱动安装,传动机构及其它元件的装置。5.桁架机械手的手臂相对其关节回转轴应尽可能在重量上均衡,这对减小电机负载和进步机械手手臂运动的响应速度是十分有利的。在设计桁架机械手的手臂时,应尽可能应用在机械手上装置的机电元器件与安装的重量来减小机械手手臂的不均衡重量,需求时还要设计均衡机构来均衡手臂剩余的不均衡重量。

